吸塵機械人|點樣規劃清潔路線 雷射鏡頭定位有咩分別
2022-08-22 00:00 
隨著智能家居的發展,相信大家早已對吸塵機械人不陌生,吸塵機械人能吸淨傳統吸塵機較難處理的邊緣縫隙,如梳化及櫃底等,而且備有時間功能的吸塵機械人更可預設啟動時間,即使用家不在家,吸塵機械人亦可按時自動工作,之不過吸塵機械人究竟是如何規劃清潔路線?
「隨機式」適合細空間
目前吸塵機械人的清掃邏輯,大致可分為「隨機式」及「規劃式」兩種。 一般款式較舊或價錢較便的機種,多數以「隨機式」盲目走位為主,這類機器人大多是透過碰撞到障礙物後隨機調整方向重新設計清理路線,導致覆蓋的區域有限。所以假設家中呎數較大,同一地方就有可能會重複打掃、而一些地方又可能會被忽略,所以「隨機式」較適合用於300-400呎左右的房間。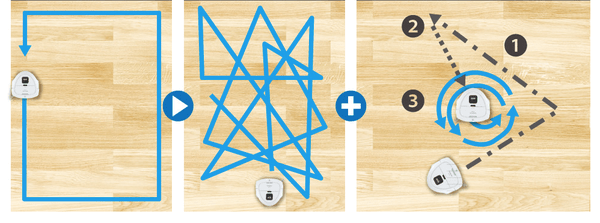
「規劃式」效率更高
「規劃式」的吸塵機械人在初次使用時需要建立環境地圖並進行定位,不同品牌的機器所採用的演算法和路徑規劃方法五花八門,亦有各自的優缺點,且適用範圍亦各不相同,其中,最常見的方式是將工作空間劃分成一個個大小相同的方格,並在每一方格區域中感測空間的自由度,以及是否有不規則障礙物後,再依循S型、弓字型或回字型路徑來回掃過、交錯清潔,避免遺漏任何區塊,令吸塵時更規律、有條理。
兩大定位技術
「規劃式」掃地機器人在執行工作時,需透過不同的即時定位系統和構圖技術來建構出屋內的佈局地圖,而現時的即時定位和構圖技術主要分為雷射測距系統或鏡頭視覺辨識系統。
鏡頭視覺辨識系統透過一內建於機身前側的鏡頭拍攝,影像會隨著機器移動辨識障礙物或可前往的地方,以做到同步定位及地圖建構的效果,兼且配搭紅外線感應器,連昏暗的環境下亦不會「迷航」。
雷射側距系統則是較常見的方式,當掃地機啟動時,雷射頭就會開始旋轉,藉由接收發射、反彈的雷射測量水平面上的設備、墻及環境距離的變化來定位,經速掃描後,基本上就可將屋內大致的形狀建立好,所以雷射側距的掃描較為精準及銳利。



最新回應