吸尘机械人|点样规划清洁路线 雷射镜头定位有咩分别
2022-08-22 00:00 
随著智能家居的发展,相信大家早已对吸尘机械人不陌生,吸尘机械人能吸净传统吸尘机较难处理的边缘缝隙,如梳化及柜底等,而且备有时间功能的吸尘机械人更可预设启动时间,即使用家不在家,吸尘机械人亦可按时自动工作,之不过吸尘机械人究竟是如何规划清洁路线?
「随机式」适合细空间
目前吸尘机械人的清扫逻辑,大致可分为「随机式」及「规划式」两种。 一般款式较旧或价钱较便的机种,多数以「随机式」盲目走位为主,这类机器人大多是透过碰撞到障碍物后随机调整方向重新设计清理路线,导致覆盖的区域有限。所以假设家中尺数较大,同一地方就有可能会重复打扫、而一些地方又可能会被忽略,所以「随机式」较适合用于300-400尺左右的房间。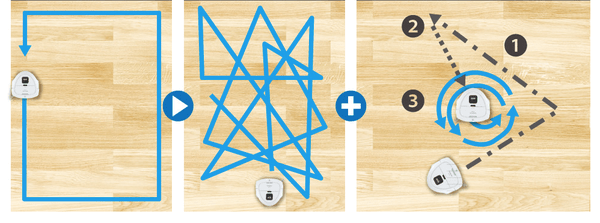
「规划式」效率更高
「规划式」的吸尘机械人在初次使用时需要建立环境地图并进行定位,不同品牌的机器所采用的演算法和路径规划方法五花八门,亦有各自的优缺点,且适用范围亦各不相同,其中,最常见的方式是将工作空间划分成一个个大小相同的方格,并在每一方格区域中感测空间的自由度,以及是否有不规则障碍物后,再依循S型、弓字型或回字型路径来回扫过、交错清洁,避免遗漏任何区块,令吸尘时更规律、有条理。
两大定位技术
「规划式」扫地机器人在执行工作时,需透过不同的即时定位系统和构图技术来建构出屋内的布局地图,而现时的即时定位和构图技术主要分为雷射测距系统或镜头视觉辨识系统。
镜头视觉辨识系统透过一内建于机身前侧的镜头拍摄,影像会随著机器移动辨识障碍物或可前往的地方,以做到同步定位及地图建构的效果,兼且配搭红外线感应器,连昏暗的环境下亦不会「迷航」。
雷射侧距系统则是较常见的方式,当扫地机启动时,雷射头就会开始旋转,藉由接收发射、反弹的雷射测量水平面上的设备、墙及环境距离的变化来定位,经速扫描后,基本上就可将屋内大致的形状建立好,所以雷射侧距的扫描较为精准及锐利。




最新回应